
On the second day of the CCF-GAIR conference, we ushered in a "special venue for robots and drones." As the first guest speaker today, Academician of the Chinese Academy of Sciences, Dean of the School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Director of the State Key Laboratory of Digital Manufacturing Equipment and Technology, Professor Ding Han, who has been engaged in the research of digital manufacturing theory and technology, brought us The keynote speech entitled "Basic Theory and Key Technologies of Fusion Robotics".
Professor Ding Han took the 2016 national key research project and the communion robot project as the background. First, he introduced the connotation of the communicative robot: a robot that can naturally interact with the working environment, people, and other robots and autonomously adapt to the complex dynamic environment and work collaboratively. He also stressed that the important objective of the project is to lead the future development of China in the robotics science, and on the other hand, it must also take into account the country's major strategic development needs.
Since then, Professor Ding Han has elaborated on communicative robots in terms of development thinking, problem research, and concrete implementation in the field of robots, and he has concluded and looked forward at the end.
Professor Ding Han mentioned that the field of robotics began to develop in the 1950s. From the initial industrialization, with the coordinated development of various sensors and computer hardware and software in the industry, it has gradually turned to the field of intelligence. However, the current state of development is still far from people's expectations. However, as various robots play an increasingly important role in the national economy and personal production and life, robotics research is becoming a new strategic commanding point in high-tech competitions in all countries.
In addition to its features such as high speed, high precision, high load, and high performance, Prof. Ding Han believes that the important feature of future robots is “communionâ€. This includes three layers of meaning:
1. The robot is highly adaptable to the environment: for example, walking in snow, working in narrow tunnels, etc.
2. High adaptability between robots and robots: multi-robot contract cooperation and mutual assistance of large-scale cluster robots.
3. Robots are highly adaptive to humans: Highly communicative between humans and robots, robots will be able to understand human thinking and actions.
Facing these three levels of communion, Prof. Ding Han elaborated on the content and direction of communicative robots from the three levels of structure, perception and operating system. Specifically including:
Has the behavior of conformity and controllability of rigid-flexible-soft structures;
With multi-modal perception communication skills;
Intelligent and distributed operating system architecture with both autonomy and group cooperation.
In the end, the three levels of research content are combined to form a system integration and verification platform for communicative robots through concrete realizations of robots of “workable craftsmenâ€, “smart considerations†and “labor division cooperationâ€.
In terms of specific implementation, Professor Ding Han said that the commissive robot project will be expected to invest 200 million yuan, which will take eight years to complete. Under the framework of the principle of encouraging originality, focusing on cutting-edge science and technology, intersecting disciplines, strengthening talent cultivation, and overall coordination, through the exchanges, cooperation, and mutual learning with various international organizations, China has continuously made breakthroughs in robot technology independently researched and developed.

Finally, Professor Ding Han showcased international leading research results such as the United States Columbia University ironing robots and the Korea National University of Seoul just soft-coupled robots, and called on everyone to actively invest in the robot research and development that is full of imagination and exploration space, the future has unlimited possibilities for application of emerging areas .
The following is a speech record:
Ladies and gentlemen, distinguished guests, good morning! First of all, I am very honored to be invited by the President of the General Assembly. Just now the host mentioned the relevant contents of our major plan. My report mainly talks about “the basic theory and key technologies of communicative robotsâ€.
Just now the host also mentioned that we have issued two major plans. One is a major plan of the Commission, one is the basic theory and key technologies of communicative robots, and the other is a plan jointly funded by the Commission of Machinery and Shenzhen. Many contents of the plan are mutually complementary and complementary to each other. However, Shenzhen’s plan may be more oriented to the actual needs of the Shenzhen area. Of course, these two plans may form a consensus in the future. We mentioned earlier that we will host an international influence. In the robot contest, everyone knows that the robot's creative direction actually requires the wisdom of everyone in many aspects. Therefore, it is possible to host a robot contest in Shenzhen. On the one hand, it stimulates everyone's interest and also raises the level of our robots. I think it's very exciting to inspire interest in robots. The deadline for the two plans is basically September 15, so I hope that all of my peers can participate in this program and contribute a lot to the development of robotics in China.
The content of my report today should not represent my personal opinion. In 2013, General Secretary Xi talked at the conference of academicians of the two academies. How do we get our country’s robot level up? How can robots occupy more markets? In Dalian, there is a forum in Dalian focusing on future development. In October 2015, we had a forum in Harbin to further demonstrate the future development. We all know that robots are really hot now. In many ways, robot research will support the industry in the future. With the development of this industry, in this industry situation, the Committee of Machine Engineers said how we can think about how we can support the development of robots. This year we just passed the robot's committee meeting. In this process, many experts and units have the wisdom that we need Leading, how to lead the frontier, how to guide the scientific and democratic thinking.
We all know where the basic research of robots is located and what the future trend of robotics development is. What are its characteristics? We have summarized that robots have evolved. From industrial robots to intelligent robots, we have come up with the concept of communicative robots. ? The people and the machine and the environment are communicative. We will talk about it in detail below.
With the development of disciplines, I think that the development of robots requires new theories and methods in structure, perception, and control. At the same time, there must be breakthroughs in some key areas. That means we must master some technologies of future robotics cores, including flexible ones. Structure, multi-modality perception, and distributed systems, I think that both the development of robotics and the country’s major needs must be emphasized. We all know the leading edge of robots. Everyone knows that many articles are about soft and soft robots. The country is also facing a transformation and upgrading. Our demographic dividend is also disappearing. I think high-end manufacturing is still very important. Strong manufacturing, strong country. Manufacturing robots play a very important role in it. We also have an aging population, rehabilitation medical care, and defense security.
Here mainly think about the context of the robot and the main features. We mentioned the development of robots. In 1950, MIT appeared in robots. Several stages appeared in the process of robots. Industrial robots were widely known. With the development of information technology and sensing technology, robots have some intelligence, so due to the development of artificial intelligence, So the intelligence of robots will gradually become more and more powerful. Of course, the current level of robots, their expectations and people's imagination are still very different. For example, our industrial robots currently work in an immobilized structure. We talk about intelligence. Robots have simple sensing. We mentioned that rehabilitation robots are passive rehabilitation. Therefore, the level of robots and our human expectations are still very different. It can be said that the ratio of what robots can do now is still relatively small. In any case, from the first generation of robots to today, robots have played an important role in national development.
When it comes to industrial robots, it is mainly executed in a structured environment. Service robots are basically simple welcome jobs. Everybody knows that special robots rely on remote control to work. Therefore, industrial robots, service robots, and special robots basically This is the three major categories. There is still a big gap between its functionality and practicality and people's expectations.
Everyone knows that robots will bring about a change in the future. This includes the Davos Forum and other proposals that may bring about a change. The specific changes brought about depend on breakthroughs in specific disciplines. In fact, we mentioned that all countries attach great importance to robots. The United States has a national robot development strategy. How to use robots from the network robots and the European Union emphasizes the application of robots in manufacturing. They have proposed a lower accuracy, which our country proposes, especially recently. It is proposed that the 2025 industry has ushered in a very good opportunity. In particular, the Shenzhen municipal government has paid great attention to research on robots and took the lead in setting up a joint production plan for robots. I think this is very good, because robots are a multidisciplinary integration and they say to all disciplines. Very helpful.
As we all know, the earliest robots we saw were all from the beginning of transportation. The simple transportation work slowly developed into painting and then welding, and some other work might be done in the future. The previous work was doing some simple, repetitive and cumbersome tasks. With fewer changes, future robots may do smart, skilled craftsmen's work, which of course depends on the development of technology. Slowly developed to have some individual intelligence, this year has the intelligence of the group, you can see the robot's development process, may be a simple interaction of the parts before, slowly develop into the complex interaction of people and the environment, what is the complex interaction, behind Explanation.
The eternal theme of the robot, I think the first point is still very important, high speed, high precision, heavy load, high reliability, high security. We should see that our robots have very good opportunities, but we do still have gaps, which are embodied in speed and so on. The second is that the human-machine environment is communicative. Apart from good performance, how robots naturally interact with the operating environment and other robots, autonomously adapt to the complexity task. As you can see, this is how American walking robots can walk in this environment. This is how British robots work in a narrow environment, including snow, ice, and mountain climbing. Second, how does a conjoined robot work in a confined space and adapt to the environment? The second feature, in the future, is definitely the mutual complementarity of multiple clusters between robots and robots. For example, one is the result of the work in Switzerland, the other is an article published in Science magazine, and there are perceptions among groups. The second and more important feature of the game and other features is that I believe that robots and humans work together. Now that the robots are still working alone, the cooperation of robots may now have a rigid growth. How will people develop their advantages in the future? Cooperation or human-machine communion is still very important. The structure needed here may be that they provide the necessary movement of the human body, as well as the enlargement of the limbs. In addition, it is necessary to accurately understand the human's behavioral intentions. It's a puzzle for the British bionic hand to tie a shoelace, a hand to tie a shoelace, and how to tie a shoelace to both hands. This is a problem. We believe that one of the future development directions of robots is, we believe, the three communions. Of course, I have one concept here, as we think that robots in the future will be communicative robots in one direction. On the one hand, its structure may be a dexterous structure. , is just soft and soft, there may be infinite freedom, perception is multimodal, mutual understanding, individual behavior self-reliance and group intelligence and collaboration.
I think that in the future development of Chinese robotics, I think that basic theory must be followed first. The development of an industry leaves the foundation of the lead. It may be that the robots you have made are not competitive internationally. One of the things that I think was very important was the structure of a rigid body. In the future, it may have a flexible structure. It has a software structure. It is very complicated. So in this, I started to study for PhD in 1986. At that time, our national 863 plan was Just after implementation, basically rigid bodies slowly developed to be flexible. This year I think that it is rigid, soft and soft, and the theoretical and computational volumes have become very prominent. It is very difficult for them to be rigid and soft. You think of a robot manufacturer. The dynamics are unclear, how could it make a heavy-duty robot. So robots can have a place in the international community. At this conference, I saw invitations to communicate with many internationally renowned professors. Second, there are many problems like this kind of rigid and soft, including the mechanism, how to adapt and control after becoming rigid.
The second problem is the human signal, how to understand each other. The third talks about mutual cooperation among multi-agents. We see that there are more than 1,000 self-subjects. Each of them has its own function from the subject, and the entire smart can use simple rules. This is some of their results.
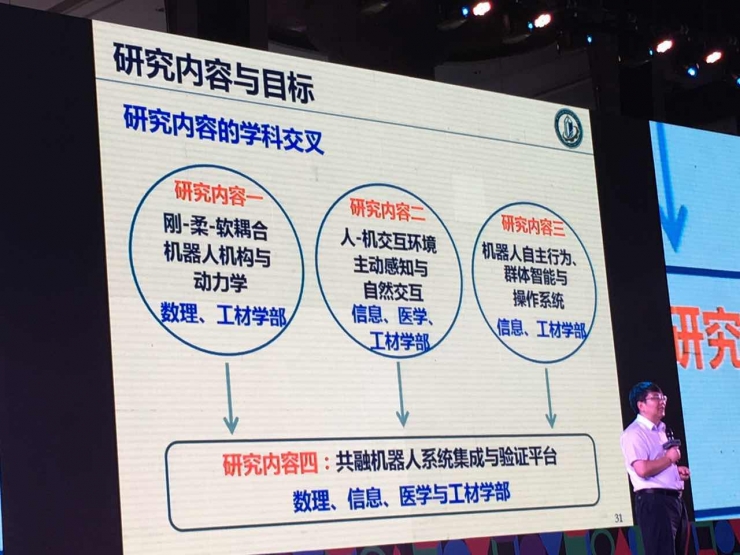
Just mentioned three problems, one may be the most important structure of the robot may be the structure of the future just and soft, the second is multimodal in the sense of the sensor, especially the human body's electromechanical signals and EEG signals, the third how to make Robots have a group of robots, how to use simple rules, individuals can be autonomous, and groups can also cooperate. This is very relevant to the direction of computer research. One of our research projects is the result of the intersection of four universities and the contents of robots. Still very much.
The second scientific problem is mainly structural, structural, future trends, many places of operation may add a soft body material, the robot application opens up a lot of situation. This is also an international article. It has 1024 individuals who can be autonomous, and groups can cooperate, perceive, and disseminate information, establish models and methods.
Another problem is whether the operating system of the robot is such a robot operating system can manage the information of the polymorphic publishing system. This one is also an important research direction, so the research of the robot is not only the structure but also the sensing. An operating system, this should be the core of the future robot. The main trend of robot development in the future may be communion with the environment and people. This is the direction of development that we have passed through experts. We just demonstrated one aspect of the future robot. We have elaborated on the most important issues in this area.
Well, in our research plan, how can we adapt the rigid and soft structural collaborators in the future? Just + soft + soft, there are a lot of them, especially one important direction, that is, the material, structure, and drive Integration, the future may not be the driving motor, many people are still very difficult to predict very accurate. The second part is mainly about the natural perception of environmental content. This is mainly the perception of multi-modality. It may be an important intention. If you cooperate with people, how do you understand the human signal? This is the second This study involved a lot of information in real time to obtain, understand and how to learn independently, to achieve active perception and natural interaction. The third, autonomous behavior, I think that group intelligence should be a very important direction. There are also operating systems. Through these operating systems, different robots can implement operations, realize group intelligence, and cooperate in group distribution. In the end, I think it's very important. To represent the characteristics of communicative robots, we must establish a system integration and verification platform. Our software is particularly important for databases, knowledge bases, and rule bases. We have bought robots and bought robots. It is very important. In fact, the accumulation of knowledge base is very important. We also have our verification platform. This is the three main research contents of our plan. The first content is mainly structural, rigid and soft, multimodal.
I mentioned that the multidisciplinary crossover of robots. I was very honored to participate in the Robotics Conference this time. Not long ago I participated in automated meetings. Automation and computers. The earliest articles I read at the time were the first to experience artificial intelligence. Four divisions such as engineering materials intersect.
Finally, the development of robotics in China can establish a rigid-flexible coupled robot design theory. The entire major research plan is 5-8 years, a total of 8 years, the Commission is 5 years, we hope to establish a communicative Basic theory and methods.
I think the robot is the carrier of the application. The effect of its final integration is very important. I think on the one hand, in the aspect of high-end manufacturing, how to form multi-robot intelligent processing, there is a corresponding cluster platform for rehabilitation robots and clusters. We have such results. Our first result is that we may have robots with skilled craftsmen in the future. I think that our ancient splendid civilization is the inheritance of some skilled craftsmen, so our ancient ancestors, in fact, their skilled craftsmen did a lot of large-scale projects. Future Robots With the breakthrough of sensing and artificial intelligence, I think there will be some robots with skilled craftsmen. So what is artificial? Artificial is that the ontology performance is high, and the entire structure design is very good. The second is the craftsman, that is, industrial knowledge and intelligence. Japan and Germany are very conscious of craft knowledge. They will be very helpful to the transformation and upgrading of the future. How can we express it and turn it into rules? The effect can be improved. First, we hope that in the major research projects, robots with skilled craftsmen will appear. I think this is still possible. The second is to show some smart rehabilitation robots. We are now passive robots. We use rigid structures and command control. I think smart means being able to sense people's intentions and understand people's intentions. And considerateness is to be able to comply. It is now wearable, uncomfortable, and does not fit well. The third direction is the special robots that cooperate in the division of labor. The special robots are the different kinds of robots that can complete the work. The division and cooperation robots we talk about are the division of labor. Each robot can have independent control and can cooperate at the same time. So this is our major research. The plan hopes that in these three categories, practical progress can be made in the future.
Here is an introduction to the implementation plan of the entire plan. We have invested 200 million yuan in funds and divided into three categories. One is the nurturing project, which may be between 700,000 and 800,000. There are also key support projects. Shenzhen's support efforts are even larger and may reach 500 million. These two aspects will be met in the future. There have been better results. To participate in the declaration of the two plans, we may do some dynamic management in the future. Some creative projects may be innovative. Some projects may adopt the form of contest, and they can give priority support and focus support to truly stimulate everyone. Interest, although the idea of ​​robotic research is very important, then with this idea, how to turn your idea into a carrier, I think it is an important aspect.
There may be a little more top-level design in our entire research program. Managers may have original ideas. They may need to focus on some exploration-oriented projects. Through some competitions, we mentioned two plans to set up a robot contest to strive for influence at home and abroad. , Can have a platform for display, the venue of the contest is in Shenzhen, and may be connected with the meeting. I think it's very important or if the disciplines intersect. I went to Germany to see how well they did a good job. They have robot manufacturers and organizations. Teams 6 and 7 are all different backgrounds. We talk about disciplines. People from different backgrounds are all around a common goal. Different backgrounds can have very good results. I think this plan is best to encourage young scholars. It is also very important that Shenzhen plans to complement each other and Shenzhen. The name of the project has been very good. The Shenzhen Robot Basic Research Center has no motivation to leave the foundation. Our tutor said that manufacturing science is the source of advanced manufacturing. It always teaches us how to use science as a guideline, and the final technological breakthrough is very good. The supplement, so we complement and link up with Shenzhen's plan and jointly push China's robot research to a higher level. We also hope to host high-level forums. In the future, we will also study some of these methods. The future of the Robot International Forum will include publications to showcase our achievements. Another aspect is through competitions that will enhance the entire research atmosphere.
This is the case of our project.
The final summary and outlook. Nowadays, industrial robots are one of the future development directions. There are many types of robots, and their development is very different from the disciplines. Therefore, the robots have a lot of research problems. We should display one part of the whole robot, no matter what. In the future, if robots are to be able to achieve breakthroughs, they must achieve communion with people, the environment, and robots. In order to realize communion, major breakthroughs must be made in the areas of structure and perception, so that there can be real development reserve forces. The goal of our entire research program is to establish the basic theory and practical methods of human-computer communion.
Here's a demonstration of my participation in the Stockholm conference in Sweden this year. We have seen MIT's just and soft 3D. It can be seen that these small areas represent a very difficult solution, as well as Korea’s Seoul National University deputy. These concepts are all very good. You see there are soft ones. We release these imaginations through competition.
In the end, perhaps speaking, I think robots will develop in the future. Everyone knows that the term “robot†first appeared as a science fiction novelist. Therefore, the future development of robots should say that the space for imagination is still large, and the exploration space is also very large. The space for applications is also very large. In the future, I hope that with the support of the Committee of Machine Engineers, we can stimulate the wide interest of scholars and have the space for imagination in their respective fields. This is to demonstrate the cooperation of robots and astronauts in the future space, so robots The direction of research is very large. It has a very large exploration space. It has a very large application space. Therefore, what we mentioned here should be the tip of the iceberg in the whole robot. What are the real issues that we need to study? I want to pass again. Communication and implementation continue to find problems, and finally let the robot's level reach a higher level, and it can yield some fruitful results. I think it should be just around the corner, especially in a city like Shenzhen, where robot research is very promising. This concludes my speech.
Moderator: Thank you, Mr. Ding Han, for your understanding. We all understand what robots and robots are in harmony with the environment and people. The following audience raised a question. I would like to put it out in a case. We know that Hong Kong is built by pushing mountains to build the island. The front is reinforced concrete floor. In particular, robots need to be positioned. Rebar has a great influence on robots. Finally, the rebar is changed into fiberglass. In order to adapt the robot to the environment, the cost is very high. We now use the communion method. How can we adapt to a normal environment by making a better robot? Can we put the cost of communicative robots? How to reduce can explain.
Ding Han: This question is very good. In fact, it is also a stage. Changing the environment so that the robot can adapt to this kind of cost and in some ways brings some changes is still not very convenient. We talk about the functional robot. We are not talking about changing the environment here, but adding the robot's perception function and it The familiar ability can finally adapt to changes in this environment, go through several stages, be passive and active, and I think autonomous and active are more critical research directions.