Tesla's driverless accident in May and how to interfer with sensors recently demonstrated on Defcon fully demonstrate the importance of sensors in driverlessness: environmental perception is the foundation of driverless implementation, if not Correct perception of the surrounding environment, then the next cognitive, decision-making and control are all airborne platforms.
From the development of sensor technology itself, it is necessary to ensure that the driverless car is safely on the road in the next ten years. The hardware performance and the software algorithms behind it, as well as the data fusion between different sensors, need to be improved.
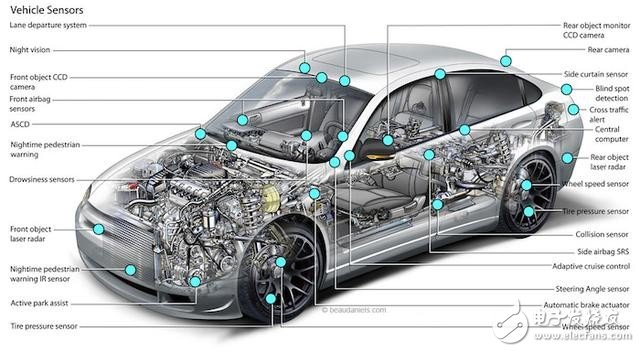
â–³Various sensors on the vehicle
There is no need to talk about the importance of sensors in driverless driving.
Tesla's Autopilot system uses the fusion data of the camera, millimeter-wave radar and ultrasonic radar to control the vehicle's driving in the highway lanes, changing lanes and adjusting the speed according to traffic conditions.
Google's all-wheelless test vehicle uses the expensive, complex remote sensing system LiDAR (Lidar).
Toyota revealed that there are 12 sensors on their high-speed road driverless cars: a front camera hidden in the rearview mirror, five radars that measure the speed of the surrounding vehicles, and six lidars that detect the surrounding target position. .
Although some companies have taken a different approach and hope to achieve environmental awareness through V2X technology, V2X relies heavily on infrastructure, and sensors are not subject to this limitation.
Lidar
The LiDAR system uses a rotating laser beam. This technology is used in the unmanned test vehicles of BMW, Google, Nissan and Apple. But if you want to apply it on a production car, the price must drop dramatically. It is widely believed in the industry that this goal can be achieved in a few years.

â–³Lidar working principle (picture from Velodyne)
Lidar works by transmitting and receiving a laser beam. Inside it, each set of components contains a transmitting unit and a receiving unit. The Velodyne above uses a rotating mirror design.
The set of transmitting/receiving components and the rotating mirror combine to scan at least one plane. The mirror not only reflects the light emitted by the diode, but also reflects the reflected light back to the receiver. By rotating the mirror, a viewing angle of 90 to 180 degrees can be achieved, and the complexity of system design and manufacturing is greatly reduced because the mirror is the only motion mechanism in it.
Pulsed light was previously used to detect distance. The principle of detecting the distance is based on the time when the light returns. The laser diode emits pulsed light. After the pulsed light is irradiated onto the target, a part of the light is reflected back. A photon detector is installed near the diode, which can detect the returned signal and transmit it by calculation. The time difference from the detection can be used to calculate the distance of the target. Once the pulse distance measurement system is activated, a large number of point clouds can be collected.
If there is a target in the point cloud, the target will appear a shadow in the point cloud. Through this shadow, the distance and size of the target can be measured. A 3D image of the surrounding environment can be generated by the point cloud. The higher the point cloud density, the clearer the image.
There are several different ways to generate 3D images of the surrounding environment through lidar.
One way to do this is to move the transmit/receive assembly up and down while rotating the mirror, sometimes called "blinking." This method can generate point clouds in the height direction, but reduces the azimuth data points (azimthdatapoints), so the point cloud density will be reduced and the resolution is not high enough.
Another method is called "light scanning laser radar" (flashLiDAR). This method uses a 2D focal plane array (FPA) to capture pixel distance information while emitting a laser to illuminate a large area. Such sensors are complex in structure and difficult to manufacture, so there is no widespread commercial application. However, it is a solid-state sensor with no moving parts, so it is possible to replace existing mechanical sensors in the future.
Although there are different LiDAR structures that can produce many forms of 3D point cloud systems, there is no system that can meet the application requirements of driverless navigation. For example, there are many systems that produce beautiful images, but it takes a few minutes to produce an image. This type of system is not suitable for mobile sensing applications. There are also some light scanning systems with high refresh rates, but the viewing angle and detection distance are too small. There are also some single beam systems that provide useful information, but can't be detected if the target is too small or beyond the viewing angle.
In order to maximize the use of LiDAR sensors, it is necessary to be able to see all the surrounding areas, that is, to achieve a 360-degree viewing angle; the data output to the user must be real-time, so data collection and screen generation must be made. The time delay between them is minimized. The driver's reaction time is usually a few tenths of a second. If we want to achieve driverless navigation, then the navigation computer's refresh rate should be at least one tenth of a second. The angle of view can not only be seen in the horizontal direction, but also in the height direction, otherwise the car will fall into the pit on the road. The vertical angle of view should be as close as possible to the vehicle so that the driver can adapt to the bumps and steep slopes of the road.
At present, there are several companies in the industry that manufacture laser radar, and their products also have their own characteristics.
Velodyne has high-precision lidar technology (HDL), which is said to provide a 360-degree horizontal viewing angle, a 26.5-degree vertical viewing angle, a 15 Hz refresh rate, and a one-megapixel point cloud per second. This year Velodyne introduced a miniaturized 32-line sensor that can achieve a detection range of 200 meters with a vertical viewing angle of 28°.

â–³ Velodyne solid state 32 line UltraPack laser radar
Leddar also has laser radar products with 360° detection capability. And because it also provides an ADAS solution, Leddar also offers sensor fusion technology that combines the data from different sensors to create an overall image of the vehicle's surroundings.
Solid-state LiDAR – as an alternative to camera/radar, can be integrated into ADAS and unmanned functions;
High-density point cloud LiDAR for high-level driverless driving;
LiDAR (eg MEMS mirror) that can support light scanning or beam measurement;
Ledaar's lidar has a range of up to 250m and a horizontal viewing angle of 140 degrees. It produces a 480,000 pixel point cloud per second with a resolution of 0.25 degrees in both horizontal and vertical directions.
Guide: Tesla's driverless accident in May, and how to interfer with sensors recently demonstrated at Defcon, fully demonstrates the importance of sensors in driverlessness: environmental perception is the foundation of driverless implementation. If the surrounding environment is not properly perceived, then the following cognition, decision-making and control are all aerial platforms.
Visual image sensor
A very wide-ranging application now combines 2D lidar with vision sensors, but the low-cost nature of vision sensors makes them an indispensable part of driverless solutions.
The image recognition technology of the visual sensor senses the surrounding environment. For the driverless, in addition to knowing what object/person is present at any position, and thus the vehicle issues a command such as deceleration braking to avoid an accident, Based on image recognition, it is able to understand the current driving scene and learn to deal with emergencies.

â–³ visual sensor workflow
If the difficulty of laser radar is how to make its performance meet the needs of driverless navigation, then the difficulty of the camera lies in the process from perception to cognition.
In the analogy of the human eye, after seeing a pedestrian or a vehicle, the human driver will prejudge the next action of the pedestrian or the vehicle based on the sight seen, and control the vehicle according to the pre-judgment. The driverless car also needs this "pre-judgment" process, and the camera plays an observation role. Driverless cars must be able to observe, understand, model, analyze, and predict the behavior of people inside the vehicle, pedestrians outside the vehicle, and people in the vicinity of the vehicle.
This process from observation to prediction applies equally to other vehicles on the road, but how to get the overall meaning of the driving scene, how to deal with sudden scenes and targets, how to accurately target short-term or long-term targets (pedestrians or vehicles) Behavioral analysis of time, and how to predict and make decisions about the surrounding people or vehicles, these technologies need to be further studied.
Car cloud summary
The research of sensors and algorithms and the corresponding engineering techniques are rapidly developing. They can make driverless cars predict the uncertain behavior of people and vehicles, and respond quickly to avoid the loss of vehicles and property. More importantly, they can protect precious lives. .
Of course, unmanned sensors are not just laser radar and camera, millimeter wave radar and ultrasonic radar, and there are no sound sensors for driverless use.
With 15+ years manufacturing experience for phone accessories.
Supply various portable charger for iPhone, Airpods, laptop, radio-controlled aircraft ,laptop, car, medical device, mobile device, ect.
Avoiding your devices run out of charge, Portable Chargers to keep your mobile device going.
From the original ordinary power bank charger to wireless power bank, green energy solar power bank, magnetic mobile power, portable power stations and other products continue to innovate.
We help 200+ customers create a custom mobile power banks design for various industries.
Portable Charger,Power Bank Charger,Mini Power Bank,Wireless Power Bank, Solar Power Bank
TOPNOTCH INTERNATIONAL GROUP LIMITED , https://www.mic11.com