This paper first briefly introduces the role of dangerous goods handling robots, the structural form of the manipulator, and focuses on the design and implementation of the control system for dangerous goods handling robots from the control system and hardware design. Finally, the technical indicators of the measured robot are given. Dangerous Goods Handling Robots are devices that can be carried and placed for the handling, removal, handling and placement of dangerous ammunition. The completion of the project will solve the problem of safe handling of dangerous ammunition such as accident shells and war remnants that have long plagued our army. The manipulator is an important component that directly contacts the ammunition during the operation of the dangerous goods handling robot. It is mainly used to carry out the clamping, dismantling, handling and placing of dangerous ammunition. The stability of the manipulator work directly determines the success rate of the ammunition treatment. The design of the robot is crucial.
The control chip of the three controllers of the robot is 2407DSP. Although the functions of the three controllers are different, in the hardware circuit design, according to the function of the DSP pin, the peripheral circuits are designed as follows:
PWM pin: Each event manager of the DSP has a PWM circuit associated with the compare unit, which can generate six PWM outputs with programmable dead band and output polarity, but all are in pairs, which is required for this controller. Independent output, each event manager has only 3 channels, one DSP has two event managers, which can output 6 PWM waves independently. The hydraulic controller requires 6 PWM waves to drive the electric proportional valve, and the servo motor controller needs 4 0-5V accelerator signals to adjust the motor speed. When designing the circuit, the two circuits are designed together and made into a printed circuit. Plate, soldering board can be welded according to the function of each board. The hydraulic controller needs to output PWM waveform. The chip uses LM393 as comparator. At this time, resistor R19 and capacitor C71 are not soldered, but R21 pull-up resistor, R17 And R18 is suitable for dividing the voltage of 2 feet to about 1.7V. The servo controller needs to output 0-5V voltage chip for LM2904 for operation. The welding resistor R19 and capacitor C17 do not need MOS tube, R21 and external power supply, and do not need to solder R17, directly amplify the DSP output 0-3.3V voltage to 0- 5V output. The PWM/voltage output circuit diagram is shown in Figure 1:
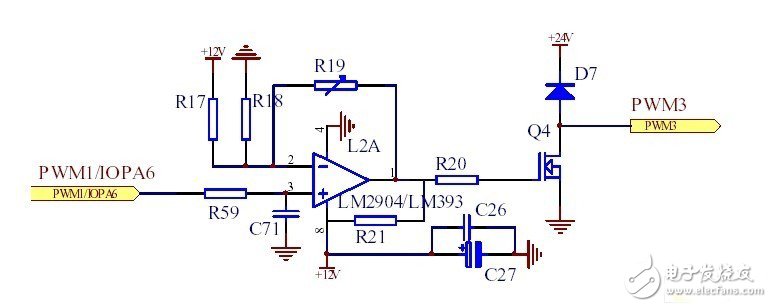
Figure 1 PWM / voltage output circuit
I\O port: DSP's digital I/O port module has the function of controlling dedicated I/O and multiplexed pins. It can output input high and low level signals, design it into switching output according to its function, input, and use it. Control the relay as a controlled switch. The digital input can be divided by a resistor, and the digital output is isolated by optocoupler. The optocoupler PC817 used in this design is more suitable for DSP. When the DSP outputs a high level, the relay is closed. The circuit diagrams of the CNETA1 and CNETA2 two-way conduction relays are shown in Figure 2:
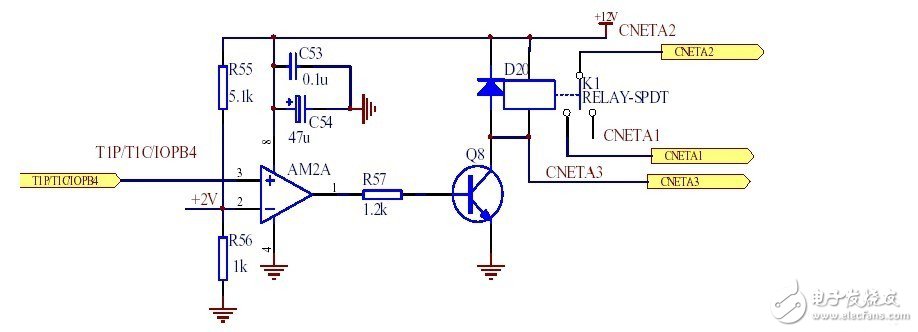
Figure 2 relay circuit diagram
QEP Circuitry: Each time manager of the DSP has a Quadrature Encoder Pulse (QEP) circuit. The quadrature encoded input pulses on the CAP1/QEP1 and CAP2/QEP2 (for EVA modules) pins can be decoded and counted when the QEP circuit is enabled. An orthogonal coded pulse circuit can be used to connect the photoelectric encoder to obtain the position and velocity of the rotating machine. The servo motor controller needs to use the QEP circuit. Since one servo motor controller needs to control 4 servo motors, the code wheel signal uses 74153 chip to select input, and each signal of the code wheel has positive and negative lines through the op amp. After inputting the DSP to 74153, the code disc selection circuit is shown in Figure 3:
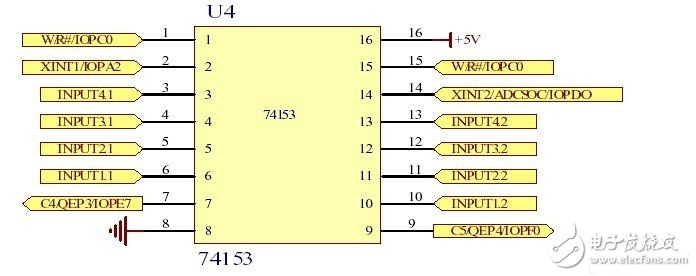
Figure 3 code disc selection circuit
Where W/R/IOPC0 is the enable signal, XINT1/IOPA2 and XINT2/ADCSOC/IOPDO form the select signal, and 74153 selects a pair of signals from the 7-pin and 9-pin outputs to the DSP by selecting the signal selection code. Other hardware circuit designs, including power supplies, serial ports, CAN buses, and DSP peripheral wiring, are typical designs.
Electronic enthusiast network technology editors comment analysis:
The design of the whole robot car has been installed and debugged. The manipulator fully meets the design requirements and achieves the following technical indicators: the maximum working range is about 2.5m; the maximum working depth is 1m underground; the clamping lifting force is ≤80kg under the maximum working amplitude; the maximum clamping ammunition diameter is 160mm. At present, there is no such professional mass production of dangerous robots in China. The successful completion of this product has laid a solid foundation for future mass production, and the market potential is huge.
If you have any questions, please feel free to discuss them in the comments section.
- Electronic enthusiast network finishing, please indicate the source!
500 Puffs Disposable ecig have a completely enclosed design, reducing the need for charging and replacing cartridges. The no-charge design also reduces the occurrence of faults. It is understood that with rechargeable e-cigarettes, each cartridge needs to be charged at least once and the battery efficiency is extremely low, while the design of disposable ecig can solve this problem very well.
500 Puff Disposable Vape,Disposable Mini Vape Stick,Puff Disposable Vape,Mini Puff Disposable Vape
Shenzhen E-wisdom Network Technology Co., Ltd. , https://www.globale-wisdom.com