At present, robots are widely used in welding, assembly, handling, painting and polishing, etc. The complexity of tasks is increasing, and users are increasingly pursuing product quality and efficiency. In this form, the programming method, programming efficiency and quality of the robot are becoming more and more important. Reducing the difficulty and workload of programming, improving programming efficiency, and realizing programming self-adaptation, thereby improving production efficiency, are the ultimate pursuit of the development of robot programming technology.
This article will give an introduction to the development of robot programming technology, hoping to give readers some inspiration.
2. Development and application of programming technologyFor industrial robots, there are mainly three types of programming methods: online programming, offline programming and autonomous programming. In the current application of robots, manual teaching still dominates the entire robot welding field. Offline programming is suitable for structured welding environments. However, for 3D welds with complex trajectories, manual teaching is not only time-consuming, but also difficult to meet the welding accuracy requirements. It has become a development trend to replace manual teaching by computer-controlled robot autonomous teaching under visual guidance.
1. Teaching programming technology
(1) On-line teaching programming is usually carried out by the operator through the teaching box to control the end of the manipulator tool to the specified posture and position, record the robot pose data and write the robot motion instructions to complete the robot's trajectory planning, pose, etc. in normal processing Collection and recording of joint data information.
The teaching box has the advantage of online teaching, and the operation is simple and intuitive. As shown in Figure 1, there are two main types of teaching boxes: programming and remote sensing. For example, using a robot to perform spot welding on a car body, first the operator controls the robot to reach each welding point and manually teaches each spot welding track. During the welding process, the taught welding track is reproduced by teaching and reproducing. Realize the welding of various welding points in various positions of the body. The spot welding process of the body robot is shown in Figure 2. However, it is difficult to ensure that the position of the body during welding is exactly the same every time. Therefore, in actual welding, it is usually necessary to add laser sensors to correct and correct the welding path.

Figure 1 Robot teaching box

Figure 2 Spot welding of car body robot
(2) Laser sensor assisted teaching
In extreme environments such as space exploration, underwater construction, and nuclear power plant repairs, operators cannot be physically present, and the completion of welding tasks must rely on remote control. The lighting conditions of the environment are poor, and the visual information cannot be fully fed back to the situation on the spot. Stereo vision is used as the visual feedback means, and the teaching cycle is long. The laser vision sensor can obtain the contour information of the weld seam and feed it back to the robot controller to adjust the welding gun's position and posture in real time to track the weld seam. Gao Hongming of Harbin Institute of Technology and others proposed laser vision sensor-assisted remote teaching technology for remote welding, which overcomes the shortcomings of remote teaching based on stereo vision display. The feature points of welds are extracted as teaching points through laser vision sensing, which improves the recognition accuracy and realizes remote teaching of flat curved welds and welds in complex spaces (see Figure 3).
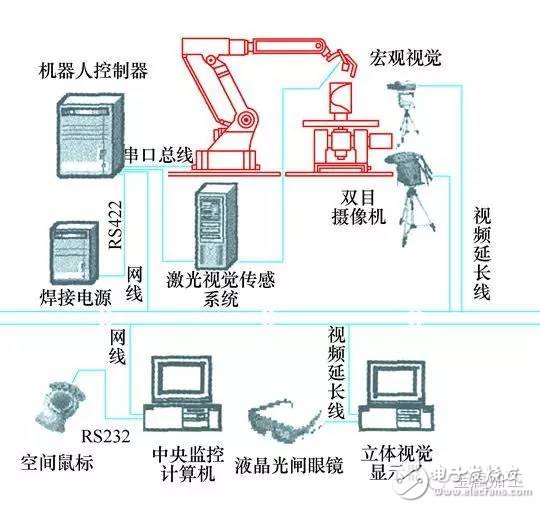
Figure 3 Remote control operating system based on laser-assisted teaching
(3) Force sensing assisted teaching
Due to the visual error, the stereo vision teaching accuracy is low. The laser vision sensor can obtain the weld contour information and feed it back to the robot controller to adjust the welding gun pose and track the weld in real time. However, it cannot adapt to all remote welding environments. For example, the surface state of the workpiece has a certain influence on the laser-assisted teaching, and it is difficult to extract the feature points of irregular welds. For this reason, Gao Hongming of Harbin Institute of Technology and others proposed the "remote welding force sense remote teaching technology" , The force sensor is used to identify the weld seam. The system has a simple structure, low cost, high response sensitivity, direct contact between the force sensor and the weld seam, and high teaching accuracy. Through force sensing remote teaching welding seam identification model and adaptive control model, the local adaptive control of remote teaching is realized, and the macro-global monitoring of remote welding and remote teaching by humans is realized through sharing technology and visual presence.
(4) Special tools assisted teaching
In order to make the robot's teaching process in three-dimensional space more intuitive, some auxiliary teaching tools are introduced into the online teaching process. The auxiliary teaching tools include a position measurement unit and a posture measurement unit to measure the spatial position and posture, respectively. Composed of two arms and one wrist, there are 6 degrees of freedom, and each key angle is recorded by a photoelectric Encoder. During operation, the operator holds the wrist of the device, teaches the processing path, records the position and posture of each point on the path, and then converts the coordinates into the processing path value of the robot to realize the teaching and programming, and the operation is simple. The precision is high, and the operator does not need to actually operate the robot, which is very convenient for many non-professional operators.
With the aid of laser and other devices for auxiliary teaching, the flexibility and flexibility of the robot are improved, the difficulty of operation is reduced, and the accuracy and efficiency of robot processing are improved, which is very practical in many occasions.
2. Offline programming technology
Compared with online programming, offline programming has the following advantages:
â‘ Reduce downtime. When programming the next task, the robot can still work on the production line.
â‘¡ It keeps programmers away from dangerous working environment and improves the programming environment.
â‘¢Wide range of use, can program various robots, and can easily realize optimized programming.
â‘£Easy to integrate with CAD/CAM system to achieve CAD/CAM/ROBOTICS integration.
⑤Can use high-level computer programming language to program complex tasks.
â‘¥ It is convenient to modify the robot program.
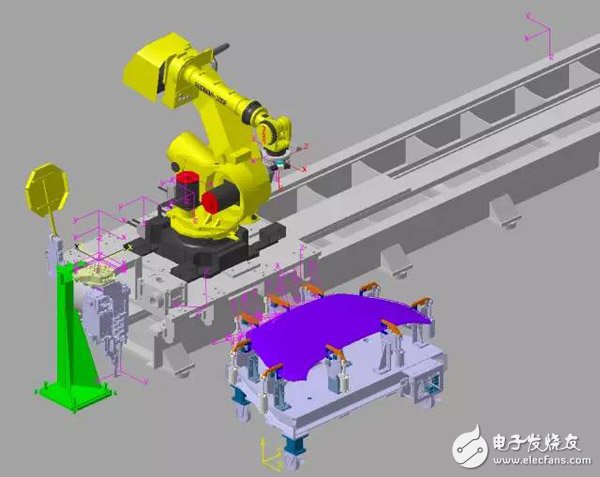
(1) The key steps of programming. Offline programming of robots is the use of computer graphics. Through the three-dimensional modeling of the work unit, the scene corresponding to the real work environment is established in the simulation environment, and the planning algorithm is used to control and operate the graphics. The trajectory planning is carried out without using the actual robot, and then the robot program is generated. The key steps are shown in Figure 4. Figure 5 is an example of off-line programming using Roboguide software from FANUC. The product is a part of Volkswagen's mold, and the surface needs to be laser cladding. Because the surface is relatively complex, it is almost impossible to determine the path by manual teaching, so offline programming software is used to solve it. First, establish the CAD model of the mold and the geometric position relationship between the robot and the mold, and then perform trajectory planning and offline programming simulation according to the specific process. After confirming that it is correct, it is downloaded to the robot control for execution. Practice has proved that good results have been achieved.
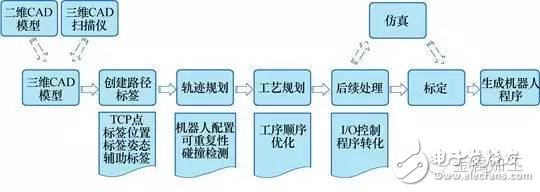
Figure 4 Key steps in offline programming
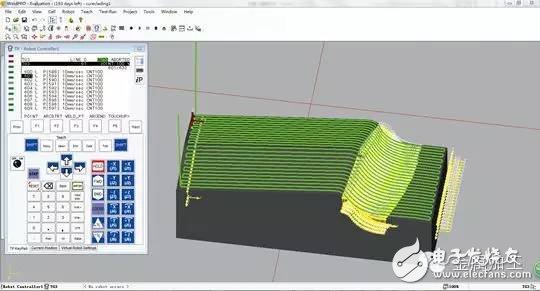
Figure 5 Offline programming and simulation based on Roboguide
(2) Commercial offline programming software generally includes: geometric modeling function, basic model library, kinematic modeling function, work unit layout function, path planning function, automatic programming function, multi-machine coordinated programming and simulation function.
Third-party offline programming (domestic): RobotArtRobotMaster, RobotWorks, Robomove, RobotCAD, DELMIA
Robot manufacturers (foreign): (ABB) RobotStudio, (FANUC) RoboGuide, (KUKA) KUKA Sim, (Yaskawa) MotoSim
The system layout can be simulated to confirm the reachability of TCP and whether it interferes, or offline programming simulation can be performed, and then the offline programming program simulation can be confirmed and downloaded to the robot for execution.
3. Autonomous programming technology
With the development of technology, various tracking measurement and sensing technologies are becoming more and more mature. People have begun to study the independent teaching technology of welding robots for welding paths based on the measurement information of the weld seam as feedback.
(1) Autonomous programming based on laser structured light. The principle of autonomous programming based on structured light is that the structured light sensor is installed at the end of the robot to form an "eye on hand" working mode, as shown in Figure 6, using welds The tracking technology measures the center coordinates of the welding seam point by point, and establishes a database of the welding seam trajectory, which is used as the path of the welding gun during welding.
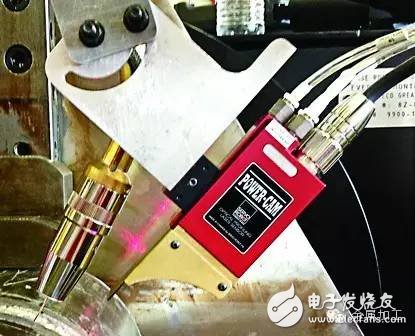
Figure 6 Path autonomous programming based on structured light
Pyunghyun Kim of South Korea installed the linear structured light vision sensor at the end of a 6-DOF welding robot, and conducted autonomous teaching on free surface welds in a structured environment. A coordinate that moves with the weld trajectory is established on the weld to express the position and direction of the weld, and combined with the connection type (lap, butt, V-shape) to form a robot welding path, which also uses a third-order spline The function fits the spatial weld trajectory, avoiding the error caused by the conventional straight line connection, as shown in Figure 7.
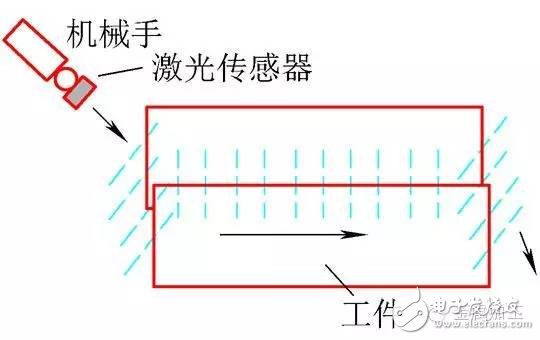
Figure 7 The sensor scans the weld to obtain the welding path
(2) Autonomous programming based on binocular vision. Autonomous teaching based on visual feedback is the key technology to realize autonomous robot path planning. Its main principle is: under certain conditions, the main control computer will automatically track along the weld through the visual sensor. Collect and identify the weld image, calculate the spatial trajectory and orientation (ie pose) of the weld, and automatically generate the pose parameters of the robot welding gun (Torch) according to the optimized welding requirements.
(3) Multi-sensor information fusion autonomous programming. Researchers use force controllers, vision sensors and displacement sensors to form a high-precision automatic path generation system. The system configuration is shown in Figure 8. The system integrates displacement, force, and vision control, introduces visual servoing, and can perform actions based on sensor feedback. In this system, the robot can automatically generate the robot path according to the line drawn by the marker pen. The displacement controller is used to maintain the pose of the robot TCP point, the vision sensor is used to make the robot follow the curve automatically, and the force sensor is used to maintain the distance between the TCP point and the surface of the workpiece. Constant.
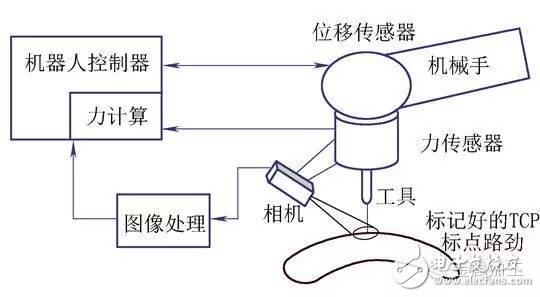
Figure 8 Path automatic generation system based on vision, force and position sensors
4. Programming technology based on augmented reality
Augmented reality technology is derived from virtual reality technology. It is a technology that calculates the position and angle of the camera image in real time and adds the corresponding image. The goal of this technology is to put the virtual world on the screen and interact with the real world. Augmented reality Technology enables the fusion of computer-generated three-dimensional objects into the real scene, and strengthens the user's interaction with the real world. The use of augmented reality technology for robot programming is revolutionary.
Augmented reality technology combines the real real environment and virtual space information. It takes advantage of animation simulation in the real environment and provides an interactive channel between the real environment and virtual space information. For example, a virtual aircraft cleaning robot model is applied to a scaled-down aircraft model. Control the virtual robot to move along a certain trajectory for the aircraft model, and then generate a robot program, and then calibrate and program the real robot.
Robot programming technology based on augmented reality (RPAR) can perform offline programming of robots without real workpiece models in the virtual environment. Since the virtual robot can be added to the real environment, this technology is a very effective method when in-situ approach is required, which can avoid technical difficulties that may be encountered in calibrating the real environment and the virtual environment. The architecture of augmented reality programming is shown in Figure 9, which consists of virtual environment, operating space, task planning and path planning, virtual robot simulation and real robot verification.
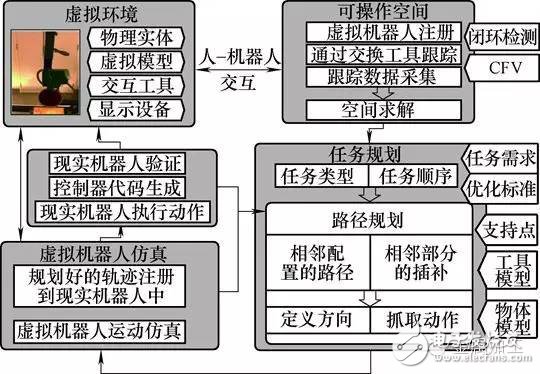
Figure 9 Robot programming architecture based on augmented reality
Summary: The traditional online teaching programming will only be applied in a few occasions. With the update of technology, the latter three will gradually increase. Some are still in the technology development period. Whoever makes a breakthrough first will gain the market.
Encoder
Optical Rotary Sensor,Custom Encoder,Optical Encoder 6Mm Shaft,Handwheel Pulse Generator
Jilin Lander Intelligent Technology Co., Ltd , https://www.jllandertech.com